



开发背景:
针对智能机器人产业发展中通用化标准化的需求,公司开展了智能服务机器人协同操作系统架构研究开发,包括主操作系统、从操作系统、通信子系统、内外部协同技术等,执行了智能服务机器人操作系统的通用化架构设计及统一的编译、仿真调试、驱动控制等技术,形成智能机器人通用操作系统(Hopen CROS)。
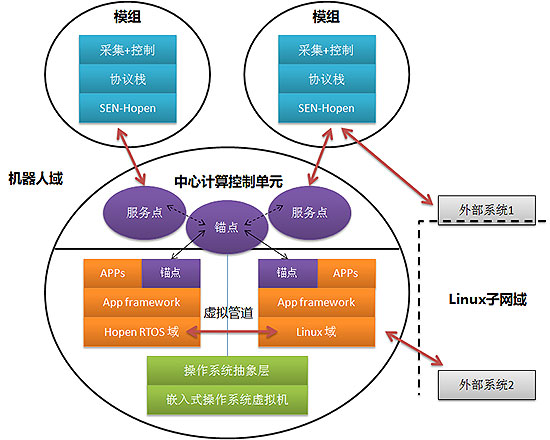
Hopen CROS - 协同式操作系统架构图
模型概述:
Hopen智能机器人通用模组是基于机器人总体和硬件环境设计,建立统一的模组设计模型,针对具体功能,设计模组控制器、执行器、传感器以及运行在决策管理单元的驱动软件,拟实现13种模组设计。此外,还针对智能服务机器人的通用模组,在操作系统中提供标准化的支撑架构和软件编程接口,以及通用的组件和调试仿真工具等,从而为研发智能机器人提供统一、便捷的流程和方法。
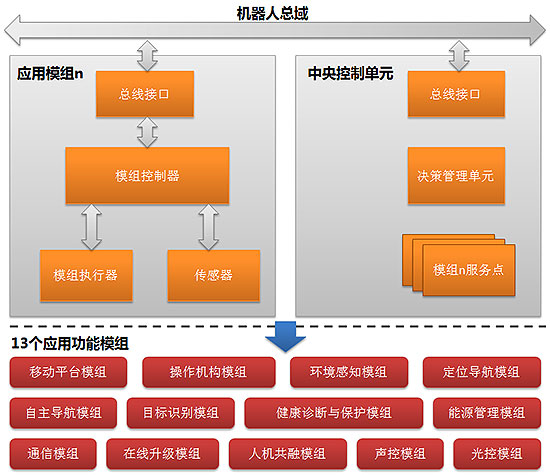
Hopen CROS通用模组功能模组-模组参考设计模型